微信公众号

手机端

搜索






微信扫一扫:分享

微信里点“发现”,扫一下
二维码便可将本文分享至朋友圈

PICO团队正式推出XRoboToolkit,这是一套基于OpenXR标准的跨平台XR机器人远程操作框架,面向全球开发者与研究机构开放。
XRoboToolkit针对现有机器人遥操作方案存在的配置复杂、延迟高、可扩展性不足等问题,提供了统一的跨平台解决思路:

核心亮点
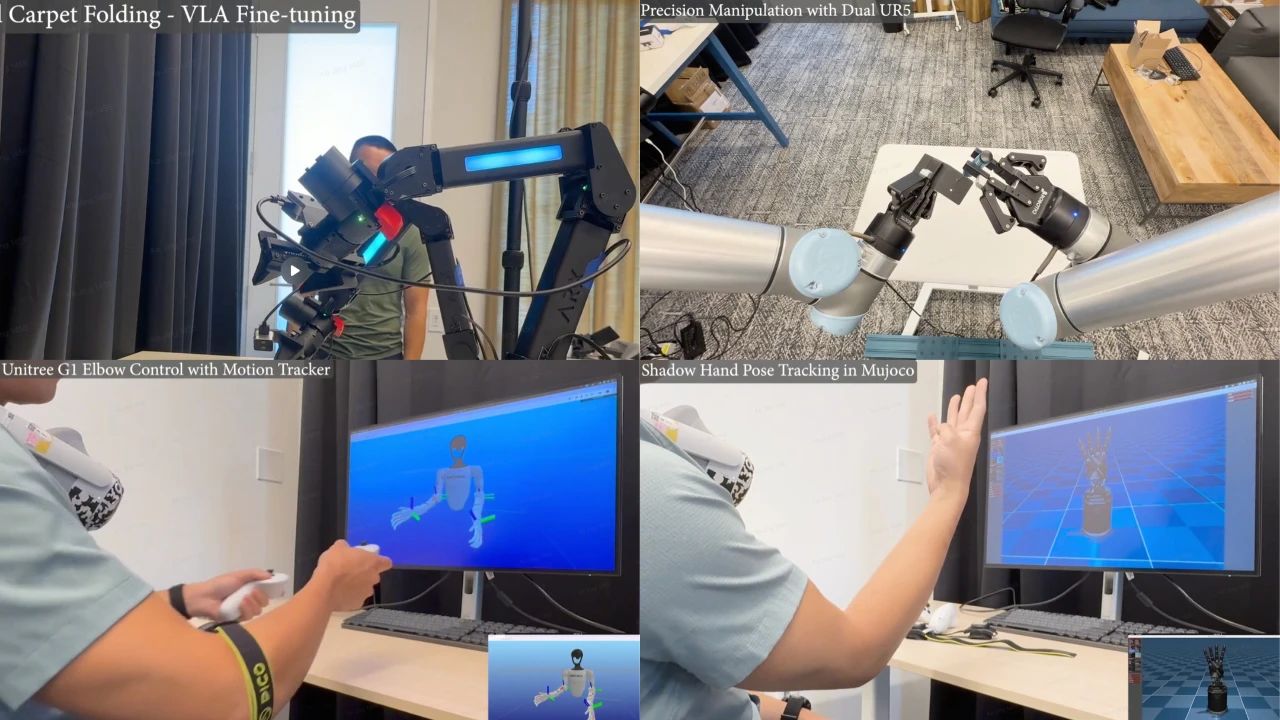
在实际测试中,XRoboToolkit已成功应用于:
XRoboToolkit项目已全面开放,将持续推动该框架的跨平台兼容性和标准化工作,包括:
来源:PICO
投稿/爆料:tougao@youxituoluo.com
稿件/商务合作: 林南(微信 19250561593) 六六(微信 13138755620)
加入行业交流群:林南(微信 19250561593)

元宇宙数字产业服务平台
下载「陀螺科技」APP,获取前沿深度元宇宙讯息